filmov
tv
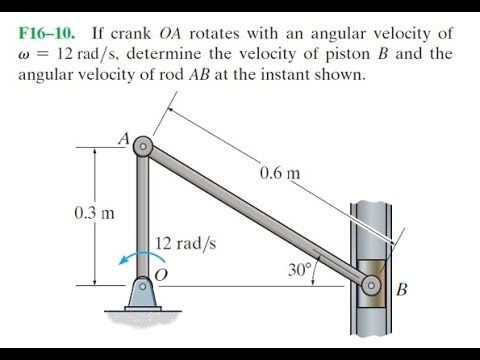
Lecture 16 - Example 2: Relative Motion Analysis - Acceleration

Показать описание
Lecture 16: Relative Motion Analysis - Acceleration
Example 16–106 Hibbeler Dynamics Book
Example 16–106 Hibbeler Dynamics Book
 0:20:30
0:20:30
Lecture 16-2, Ch20 Quantum Teleportation 2 and Entanglement Swapping - IBM-Q example
 1:21:46
1:21:46
Lecture 16 | Adversarial Examples and Adversarial Training
 0:45:24
0:45:24
CEEN 341 - Lecture 16 - Computing Consolidation Settlements
 1:11:41
1:11:41
Lecture 16: Bayes Nets
 0:14:44
0:14:44
Lecture 15 - Example 3: Relative Motion Analysis - Velocity
 1:03:37
1:03:37
Lecture 16 Bayes Nets IV: Sampling
 1:20:38
1:20:38
Lecture 16: Eigenstates of the Angular Momentum Part 2
 0:46:47
0:46:47
Variational Methods for Computer Vision - Lecture 16 (Prof. Daniel Cremers)
 1:17:59
1:17:59
AMCL21 – David Höhne – Lecture 2
 0:46:27
0:46:27
Lecture 16 - How to Run a User Interview (Emmett Shear)
 0:20:56
0:20:56
lecture 16 : Decoder Design related problems
 0:05:59
0:05:59
Revaluation model + example under IAS 16 (IFRS Kit lecture)
 0:50:22
0:50:22
Math 2B. Calculus. Lecture 16. Improper Integrals
 1:15:18
1:15:18
CS480/680 Lecture 16: Convolutional neural networks
 1:20:42
1:20:42
Lecture 16: Introduction to Elliptic Curves by Christof Paar
 3:31:35
3:31:35
Surface And Flux Integrals, Parametric Surf., Divergence/Stoke's Theorem: Calculus 3 Lecture 15...
 0:33:51
0:33:51
Lecture 16 - Generation of Random Numbers
 0:09:05
0:09:05
Complex Analysis | Unit 2 | Lecture 13 | Example of Cauchy's Integral Formula
 1:10:07
1:10:07
Lecture 16: Detection and Segmentation
 1:48:37
1:48:37
Stanford CS229: Machine Learning | Summer 2019 | Lecture 16 - K-means, GMM, and EM
 0:08:48
0:08:48
Class 10 - Physics - Chapter 16 - Lecture 2 - 16.3 Cathode-Ray Oscilloscope - Allied Schools
 0:33:04
0:33:04
Lecture 16: Stereo
 1:14:49
1:14:49
2014 Personality Lecture 16: Extraversion & Neuroticism (Biology & Traits)
 0:17:32
0:17:32
Bootstrap - Grid Layout | Web Development Course | Lecture 16
Комментарии