filmov
tv
ENB458 lecture 1: Introduction to digital control
Показать описание
QUT ENB458 Advanced control, Lecture 7 - Introduction to digital control.
In this lecture we discuss why it makes sense to use a computer to implement a control system, a digital control system.
In this lecture we discuss why it makes sense to use a computer to implement a control system, a digital control system.
 0:58:18
0:58:18
ENB458 lecture 1: Introduction to digital control
 1:08:43
1:08:43
ENB458: sampling time, aliasing and discrete-time state-space form
 0:53:50
0:53:50
ENB458 lecture 5: creating a digital controller
 0:58:35
0:58:35
ENB458 lecture 2: Laplace transform to difference equation
 0:22:22
0:22:22
Discrete control #1: Introduction and overview
 0:23:14
0:23:14
Digital Control System, Lecture-1
 0:05:36
0:05:36
Peter test
 1:01:07
1:01:07
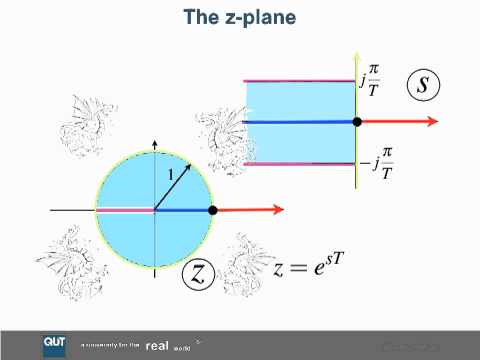
ENB458 lecture 3: Welcome to the z-plane
 0:14:55
0:14:55
EGLM03 Introduction to Digital Control
 1:07:29
1:07:29
ENB339 lecture 1: Introduction to robot vision
 0:11:42
0:11:42
Digital Systems Implementation Lecture 1-1
 0:14:36
0:14:36
Eng. Haitham (EE419 - Discrete Control - Part1)
 1:14:36
1:14:36
Lecture1- Z-Transform
 0:01:08
0:01:08
MOOC 'Introduction to Robotics' course trailer
 0:12:32
0:12:32
DISCRETE CONTROL SYSTEM - INTRODUCTION
 0:05:54
0:05:54
Digital control 1: Overview
 0:09:28
0:09:28
Discrete-Time Signals and Systems Introduction (1/6): Signals and Systems
 0:50:22
0:50:22
L01_S09_ChE4198.mp4
 1:02:25
1:02:25
Lecture 1 Here we study the definition, applications on Z Transform, and Results on Z -Transforms.
 0:00:11
0:00:11
Demonstration of a projection from Laplace plane (s-plane) to z-plane
 0:14:46
0:14:46
Digital Control System Lecture 5 (Part 1)
 0:02:02
0:02:02
Digital control: design methodology
 0:07:47
0:07:47
Signals, Systems and Control Introduction
 0:19:58
0:19:58
Single Loop Control Methods - Control Introduction // Chapter 1
Комментарии