filmov
tv
Neuroevolution: How to Stop a Double Pendulum

Показать описание
Reupload since one of the panels showed the wrong data [1].
0:00 regular double pendulum
0:20 result after 10'000 generations
0:40 comparison with intermediate results
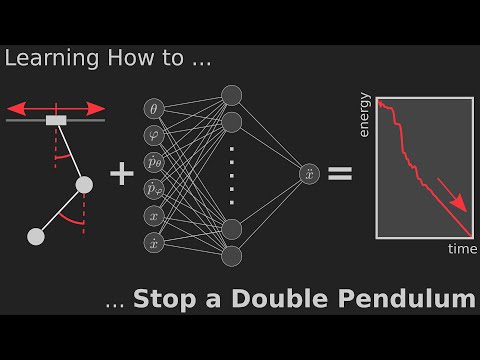
The popularity of neural networks has risen rapidly over the recent years. Similarly, the broadness of their deployment has increased as well. Here, a very basic neural network (with a single hidden layer of 40 neurons) is used to solve a simple common task from control engineering, i.e. stopping the motion of a, in this example, double pendulum as fast as possible by appropriately moving the suspension driven by some motor.
The double pendulum is a physical system well-known for its property to generally oscillate in a chaotic manner and therefore constitutes an interesting candidate for testing. The output of the neural network then determines the suspension's acceleration based on the pendulum's current position in the phase space as well as the position and velocity of the suspension. The motor is limited by both the maximum acceleration it can achieve and the space it can move in.
The network's weights have been fitted to minimize the average total energy relative to the initial energy in a given amount of time with an evolutionary approach [2].
[2] K. O. Stanley et al., "Designing neural networks through neuroevolution", Nature Machine Intelligence 1, 24 (2019).
0:00 regular double pendulum
0:20 result after 10'000 generations
0:40 comparison with intermediate results
The popularity of neural networks has risen rapidly over the recent years. Similarly, the broadness of their deployment has increased as well. Here, a very basic neural network (with a single hidden layer of 40 neurons) is used to solve a simple common task from control engineering, i.e. stopping the motion of a, in this example, double pendulum as fast as possible by appropriately moving the suspension driven by some motor.
The double pendulum is a physical system well-known for its property to generally oscillate in a chaotic manner and therefore constitutes an interesting candidate for testing. The output of the neural network then determines the suspension's acceleration based on the pendulum's current position in the phase space as well as the position and velocity of the suspension. The motor is limited by both the maximum acceleration it can achieve and the space it can move in.
The network's weights have been fitted to minimize the average total energy relative to the initial energy in a given amount of time with an evolutionary approach [2].
[2] K. O. Stanley et al., "Designing neural networks through neuroevolution", Nature Machine Intelligence 1, 24 (2019).
 0:01:15
0:01:15
Neuroevolution: How to Stop a Double Pendulum
 0:24:37
0:24:37
Neuroevolution - NEAT
 0:13:39
0:13:39
Neuroevolution of Augmenting Topologies (NEAT)
 0:28:08
0:28:08
Snake learns with NEUROEVOLUTION (implementing NEAT from scratch in C++)
 0:01:38
0:01:38
Neuroevolution
 0:18:07
0:18:07
NEAT Algorithm Visually Explained
 1:22:09
1:22:09
EvoJAX: Hardware-Accelerated Neuroevolution
 0:38:25
0:38:25
Neuro-Evolution of Augmenting Topologies (NEAT) - Complex Systems Simulation and Artificial Life
 0:08:31
0:08:31
AI Neuro Evolution Demo and Tutorial for Beginners
 0:24:34
0:24:34
Modeling Evolution with Tensorflow.js
 0:42:29
0:42:29
The NEAT Algorithm is Neat
 0:14:02
0:14:02
11.1: Introduction to Neuroevolution - The Nature of Code
 0:21:27
0:21:27
NEAT - Introduction
 1:29:29
1:29:29
Live Stream #124.1 - Linting and Neuroevolution - Part 1
 0:07:24
0:07:24
Neural Network Learns To Drift (Q-Learning vs Neuroevolution)
 0:05:58
0:05:58
MarI/O - Machine Learning for Video Games
 0:58:09
0:58:09
NeuroEvolution of Augmenting Topologies (NEAT) and Compositional Pattern Producing Networks (CPPN)
 0:00:16
0:00:16
Neural Nets Robot is Learning to Trade
 0:12:13
0:12:13
What are Genetic Algorithms?
 0:13:55
0:13:55
RNN Symposium 2016: Risto Miikkulainen - Scaling up Deep Learning through Neuroevolution
 0:18:57
0:18:57
Jeff Smith: Neuroevolution in Elixir
 0:47:39
0:47:39
Neuroevolution: Evolving Novel Neural Network Architectures with Kenneth Stanley - #94
 0:21:24
0:21:24
Evolving AI - Tom C
 0:22:43
0:22:43
11.2: Neuroevolution: Crossover and Mutation - The Nature of Code
Комментарии