filmov
tv
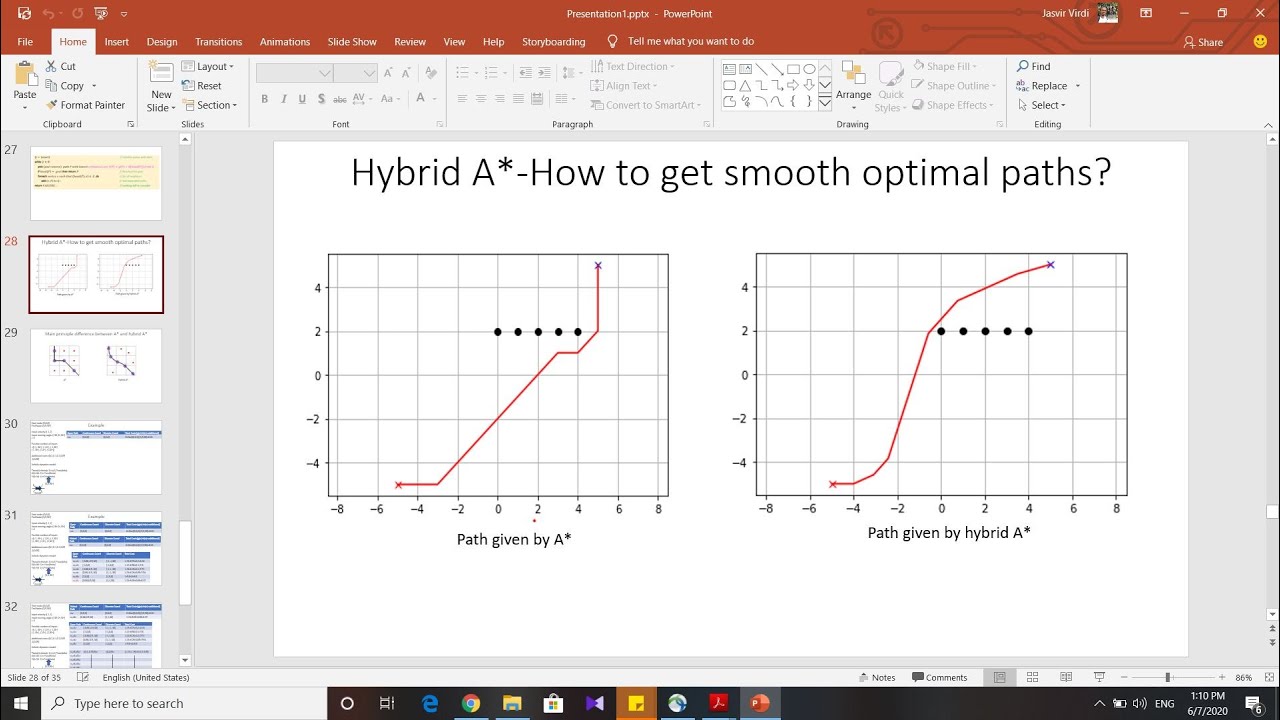
Motion Planning - Finding smooth optimal paths using Hybrid A*/Astar for autonomous vehicles
Показать описание
In this video, I have explained how hybrid A*/Astar algorithm works. This algorithm is particularly useful in finding smooth optimal paths going from start node to goal node. These paths can be tracked closely by self driving vehicles as this algorithm incorporates vehicle dynamics.
This is the fifth video in the series on "Motion Planning". In case you haven't watched the video on A*/Astar algorithm, here is the link:
If you have any questions/suggestions, let me know in the comments section.
Here are the time stubs for this video:
0:00 - Difference between Hybrid A*/Astar and A*/Astar
2:40 - How Hybrid Astar/A* works?
13:47 - More examples of paths given out by Hybrid A* & A*
15:18 - Hybrid A* being used in autonomous vehicles
This is the fifth video in the series on "Motion Planning". In case you haven't watched the video on A*/Astar algorithm, here is the link:
If you have any questions/suggestions, let me know in the comments section.
Here are the time stubs for this video:
0:00 - Difference between Hybrid A*/Astar and A*/Astar
2:40 - How Hybrid Astar/A* works?
13:47 - More examples of paths given out by Hybrid A* & A*
15:18 - Hybrid A* being used in autonomous vehicles
 0:15:57
0:15:57
Motion Planning - Finding smooth optimal paths using Hybrid A*/Astar for autonomous vehicles
 0:01:38
0:01:38
Smooth-path Motion Planning with RRT*, Potential Field, Dubins' Curves
 0:00:24
0:00:24
Smooth Time Optimal Path Following for Arbitrary Long Paths
 0:02:50
0:02:50
A Novel RRT Extend Function for Efficient and Smooth Mobile Robot Motion Planning
 0:17:55
0:17:55
Path Planning with A* and RRT | Autonomous Navigation, Part 4
 0:00:08
0:00:08
Path Smoothing for RRT
 0:00:24
0:00:24
A* Path Smoothing Exposition
 0:05:40
0:05:40
Trajectory Generation | Robotics | Mathematical Introduction to Robotics
 0:00:18
0:00:18
Bulk-generated PRM with Path Smoothing
 0:59:36
0:59:36
Autonomy Talks - Zac Manchester: Composable Optimization for Contact-Rich Motion Planning & Cont...
 0:11:13
0:11:13
Motion Planning - Finding shortest route via A*/Astar algorithm
 0:00:11
0:00:11
Motion Planning with PRM
 0:00:38
0:00:38
6: Path Planning for Load Carrying Robot on SHP
 0:00:17
0:00:17
Finding Minimum Energy Trajectories
 0:03:00
0:03:00
Gradient-Informed Path Smoothing for Wheeled Mobile Robots
 1:20:09
1:20:09
6.4210 Fall 2023 Lecture 12: Motion Planning- Sampling Based and Global Optimization
 1:38:21
1:38:21
Robot Motion Planning using A* (Cyrill Stachniss)
 0:00:25
0:00:25
Successfully implemented motion planning algorithm RRT on a UR5 Robot🤖.
 0:00:56
0:00:56
RRT with path smoothing
 0:01:15
0:01:15
Real-time-path-planning with dynamic obstacle avoidance
 1:36:40
1:36:40
Lecture 15 | MIT 6.881 (Robotic Manipulation), Fall 2020 | Motion Planning (Part 1)
 1:26:04
1:26:04
Lecture 15: MIT 6.800/6.843 Robotics Manipulation (Fall 2021) | 'Motion Planning Optimization-b...
 0:05:06
0:05:06
26 - Motion planning: part 1
 0:03:09
0:03:09
Smooth Path Planning Algorithms in Dynamic Environments
Комментарии