filmov
tv
10. Depth-First Search
Показать описание
MIT 6.006 Introduction to Algorithms, Spring 2020
Instructor: Justin Solomon
This class builds on the previous lecture of breadth-first search (BFS) by introducing depth-first search (DFS) and full-BFS and full-DFS. The lecture continues with topological sorts and cycle detection.
License: Creative Commons BY-NC-SA
Instructor: Justin Solomon
This class builds on the previous lecture of breadth-first search (BFS) by introducing depth-first search (DFS) and full-BFS and full-DFS. The lecture continues with topological sorts and cycle detection.
License: Creative Commons BY-NC-SA
 0:52:23
0:52:23
10. Depth-First Search
 0:18:31
0:18:31
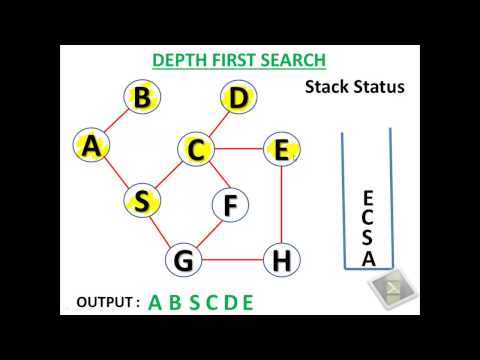
5.1 Graph Traversals - BFS & DFS -Breadth First Search and Depth First Search
 0:03:47
0:03:47
Depth First Search Algorithm
 0:10:20
0:10:20
Depth First Search Algorithm | Graph Theory
 0:07:16
0:07:16
Depth First Search
 0:07:41
0:07:41
Learn Depth First Search in 7 minutes ⬇️
 0:20:27
0:20:27
6.2 BFS and DFS Graph Traversals| Breadth First Search and Depth First Search | Data structures
 0:20:52
0:20:52
Depth First Search (DFS) Explained: Algorithm, Examples, and Code
 0:09:13
0:09:13
Depth First Search (DFS) with example | Uninformed Search | Artificial Intelligence
 0:02:36
0:02:36
Depth-First Traversals
 0:00:34
0:00:34
Depth First Search (DFS) Algorithm Explained
 0:13:01
0:13:01
Top 5 Most Common Graph Algorithms for Coding Interviews
 0:00:24
0:00:24
Depth First Search (DFS) Algorithm Python Implementation
 0:11:54
0:11:54
Binary tree traversal - breadth-first and depth-first strategies
 0:07:23
0:07:23
Breadth First Search Algorithm | Shortest Path | Graph Theory
 0:11:16
0:11:16
L-4.15: BFS & DFS | Breadth First Search | Depth First Search | Graph Traversing | DAA
 0:10:30
0:10:30
Graph Search Algorithms in 100 Seconds - And Beyond with JS
 0:08:36
0:08:36
I gave 127 interviews. Top 5 Algorithms they asked me.
 0:03:40
0:03:40
Iterative Deepening
 0:06:25
0:06:25
Graphs - Depth First Search
 0:02:52
0:02:52
Depth First Search || Tamil || 3mins
 0:10:41
0:10:41
Breadth First Search (BFS): Visualized and Explained
 0:06:46
0:06:46
Graph Searching 5 Performing DFS by Hand
 0:11:48
0:11:48
Clone Graph - Depth First Search - Leetcode 133
Комментарии