filmov
tv
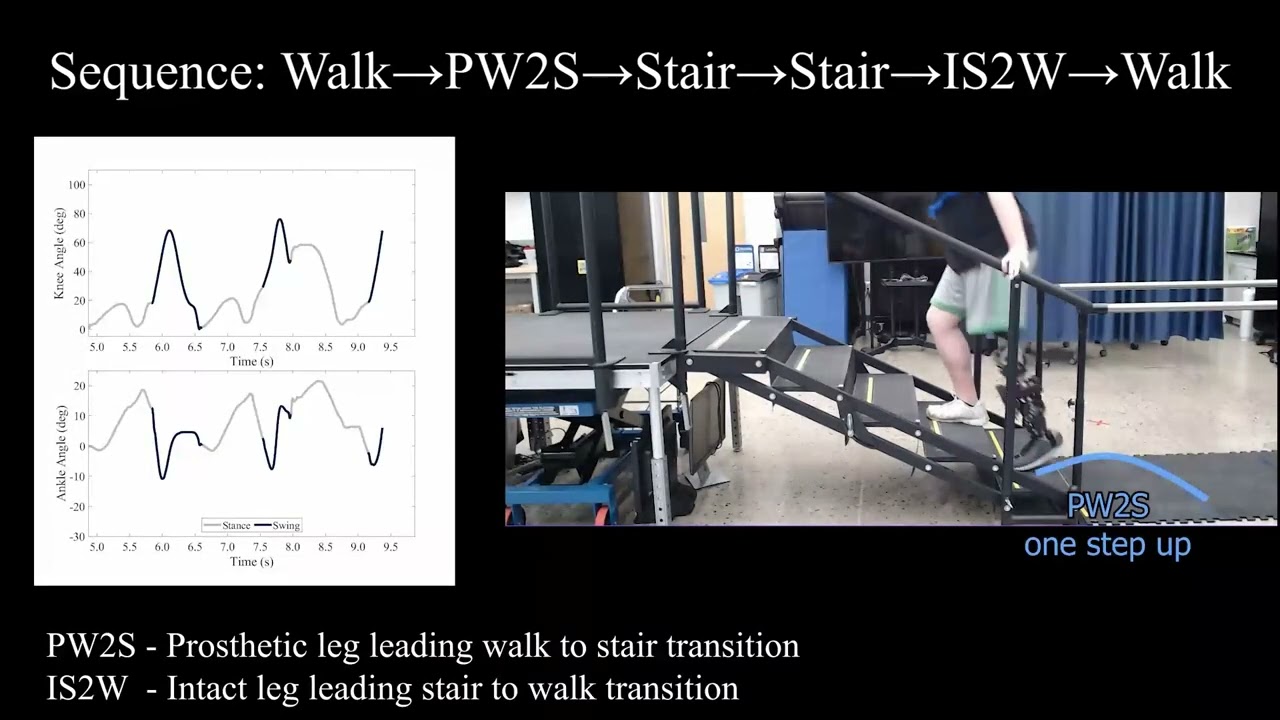
Controlling Powered Prosthesis Kinematics over Continuous Transitions Between Walk and Stair Ascent
Показать описание
One of the primary benefits of emerging powered prosthetic legs is their ability to facilitate step-over-step stair ascent by providing positive mechanical work. Existing control methods typically have distinct steady-state activity modes for walking and stair ascent, where activity transitions involve discretely switching between controllers and often must be initiated with a particular leg. However, these discrete transitions do not necessarily replicate able-bodied joint biomechanics, which have been shown to continuously adjust over a transition stride. This paper presents a phase-based kinematic controller for a powered knee-ankle prosthesis that enables continuous, biomimetic transitions between walking and stair ascent. The controller tracks joint angles from a data-driven kinematic model that continuously interpolates between the steady-state kinematic models, and it allows both the prosthetic and intact leg to lead the transitions. Results from experiments with two transfemoral amputee participants indicate that knee and ankle kinematics smoothly transition between walking and stair ascent, with comparable or lower root mean square errors compared to variations from able-bodied data.
Supplemental multimedia for the article:
S. Cheng, C. Laubscher, and R. Gregg, "Controlling Powered Prosthesis Kinematics over Continuous Transitions Between Walk and Stair Ascent," IEEE Int. Conf. Intelligent Robots and Systems, 2023.
Supplemental multimedia for the article:
S. Cheng, C. Laubscher, and R. Gregg, "Controlling Powered Prosthesis Kinematics over Continuous Transitions Between Walk and Stair Ascent," IEEE Int. Conf. Intelligent Robots and Systems, 2023.
 0:00:59
0:00:59
 0:00:59
0:00:59
 0:03:26
0:03:26
 0:00:28
0:00:28
 0:01:21
0:01:21
 0:07:49
0:07:49
 0:10:08
0:10:08
 0:58:34
0:58:34
 0:01:54
0:01:54
 0:57:35
0:57:35
 0:02:59
0:02:59
 0:54:08
0:54:08
 0:01:16
0:01:16
 0:01:01
0:01:01
 1:04:35
1:04:35
 0:01:01
0:01:01
 0:01:12
0:01:12
 0:00:18
0:00:18
 0:20:41
0:20:41
 0:45:49
0:45:49
 0:01:02
0:01:02
 0:17:37
0:17:37
 0:00:49
0:00:49
 0:02:20
0:02:20