filmov
tv
Automatic Docking to a Battery Charging Station - ROS 2
Показать описание
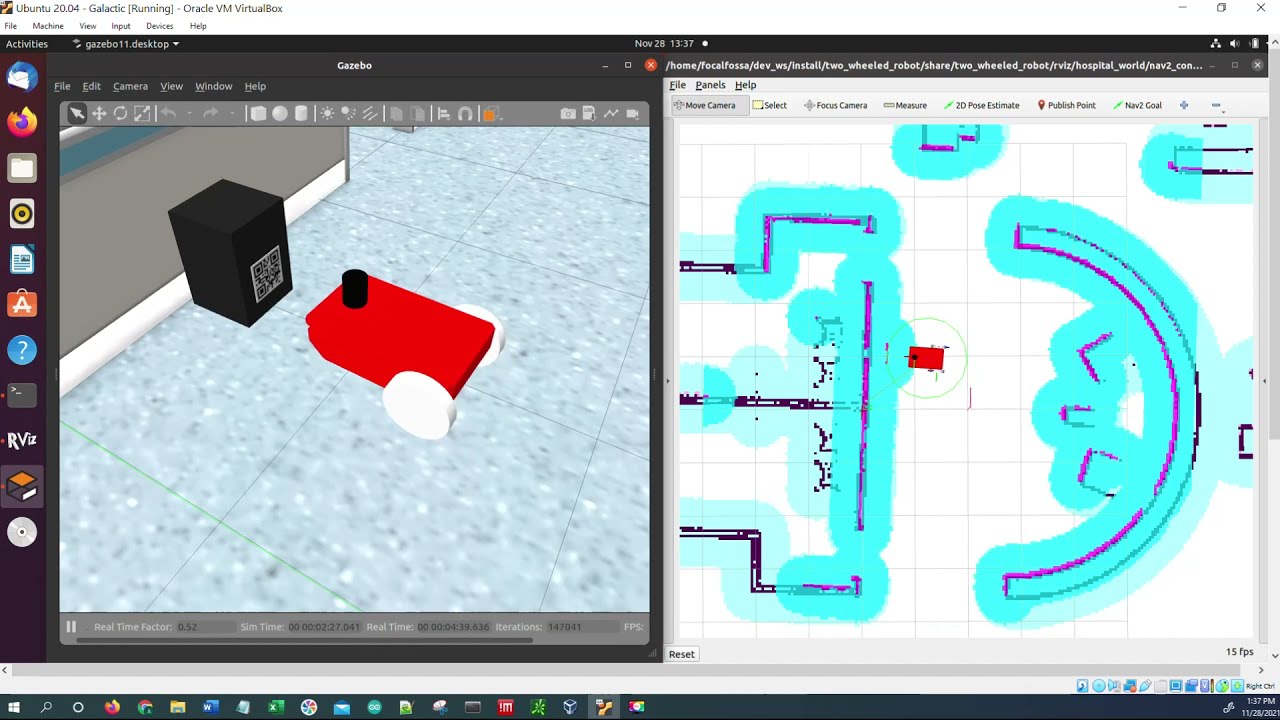
In this video, I show an autonomous docking application for a two-wheeled mobile robot.
When the battery gets low, the robot automatically navigates to a charging station (also known as docking station) to recharge its battery.
The two most common ways to implement autonomous docking are:
- ARTag (e.g. Neobotix)
- Infrared Receiver and Transmitter (e.g. iRobot Roomba)
In this demo, I assume we know the location of the battery charging station. You can use what I developed here as a template for ARTag or Infrared-based automatic docking.
When the battery gets low, the robot automatically navigates to a charging station (also known as docking station) to recharge its battery.
The two most common ways to implement autonomous docking are:
- ARTag (e.g. Neobotix)
- Infrared Receiver and Transmitter (e.g. iRobot Roomba)
In this demo, I assume we know the location of the battery charging station. You can use what I developed here as a template for ARTag or Infrared-based automatic docking.
 0:00:59
0:00:59
Automatic Docking to a Battery Charging Station - ROS 2
 0:01:47
0:01:47
Automatic Docking & Battery Swapping for Robot
 0:00:12
0:00:12
Docking station and opportunity charging for AGV
 0:00:19
0:00:19
R6 Auto Docking
 0:00:12
0:00:12
AGVR AGV Automatic docking Opportunity charging
 0:00:55
0:00:55
BIG-i's Auto-dock Charging Demo Test
 0:03:38
0:03:38
This Is DJI Dock 2
 0:00:23
0:00:23
How To Charge Battery | Roomba® 800 series | iRobot®
 0:08:49
0:08:49
✅ Top: 6 Best Robot Vacuums of 2025 || The Best Robot Vacuums in 2025 - Reviews
 0:23:56
0:23:56
Docking and Launching Automatically - Getting Started with Drones
 0:00:21
0:00:21
Automatic Docking in Rviz
 0:04:51
0:04:51
AUTOMATIC DOCKING SYSTEM FOR RECHARGING SURVEILLANCE ROBOTS
 0:03:34
0:03:34
How to use the Compact Charging Dock | Meta Quest 3 + Meta Quest 3S
 0:00:26
0:00:26
Wheelphone target automatic docking
 0:00:22
0:00:22
Autonomous robot with QR code auto docking
 0:00:16
0:00:16
Wheelphone target automatic docking (2)
 0:01:48
0:01:48
HEISHA D80, D60 Drone auto-charging station is compitable with DJI Mavic3
 0:00:37
0:00:37
Charger prototype finding its way to Model S
 0:05:24
0:05:24
A robot just swapped my electric car's battery
 0:00:29
0:00:29
ArloBot Auto Docking 001
 0:00:07
0:00:07
Auto docking
 0:00:25
0:00:25
Dyson V8 with Wall Mounted Charging Dock
 0:05:13
0:05:13
Can This Robot Save My Disgusting Pool? Aiper Seagull Pro Review
 0:00:49
0:00:49
DON'T DO THIS with your Nintendo Switch OLED ⛔️ #Shorts
Комментарии