filmov
tv
2. Damped Free Oscillators

Показать описание
MIT 8.03SC Physics III: Vibrations and Waves, Fall 2016
Instructor: Yen-Jie Lee
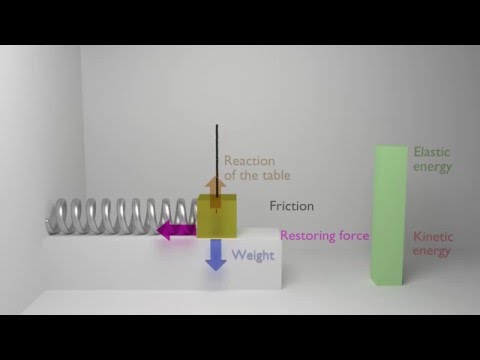
A more realistic physical system, a damped oscillator, is introduced in this lecture. Prof. Lee shows the mathematical solutions actually match the behavior of physical systems. He also does an in-class demo to compare damped and undamped oscillators.
License: Creative Commons BY-NC-SA
Instructor: Yen-Jie Lee
A more realistic physical system, a damped oscillator, is introduced in this lecture. Prof. Lee shows the mathematical solutions actually match the behavior of physical systems. He also does an in-class demo to compare damped and undamped oscillators.
License: Creative Commons BY-NC-SA
 1:16:33
1:16:33
2. Damped Free Oscillators
 0:42:24
0:42:24
Damped free oscillators 2
 0:12:22
0:12:22
Ch 2 - 2.4.1 Free Damped Oscillation
 0:02:57
0:02:57
Damped Oscillatory Motion
 0:11:16
0:11:16
Mechanical Vibrations: Underdamped vs Overdamped vs Critically Damped
 0:00:36
0:00:36
Damped Harmonic Oscillator
 0:14:19
0:14:19
Damping and Damped Harmonic Motion
 0:08:10
0:08:10
Damped Oscillations
 0:01:00
0:01:00
Animation of a damped harmonic oscillator (physics, mechanics)
 0:08:57
0:08:57
Damped Oscillations
 0:00:11
0:00:11
Damped oscillation
 0:10:06
0:10:06
Harmonic Oscillator--Damped Oscillations
 0:00:25
0:00:25
Simple Harmonic Motion
 0:19:42
0:19:42
Understanding Vibration and Resonance
 0:00:46
0:00:46
Simple harmonic oscillator||Compound pendulum||Lissajous figures||Free,damped,forced oscillations
 0:03:32
0:03:32
Coupled Oscillators
 0:00:16
0:00:16
w of damped oscillations #shorts #short #shortvideo #shortsvideo #neet #gyan #jee @GyanFreedom
 1:01:53
1:01:53
2. Harmonic Oscillators with Damping
 0:00:39
0:00:39
Damped oscillation in an RLC circuit
 0:09:25
0:09:25
Free damped oscillation + Driven oscillation G12 LS ( part 2)
 0:35:15
0:35:15
Damped oscillator - three problems
 0:00:15
0:00:15
damped oscillations of pendulum | string and bob #oscillation #waves #learning @GyanFreedom
 0:00:06
0:00:06
Damped Oscillation ||Undamped Oscillation #shorts #allaboutphysics
 0:00:53
0:00:53
3A50.10 - Damped Harmonic Oscillator
Комментарии