filmov
tv
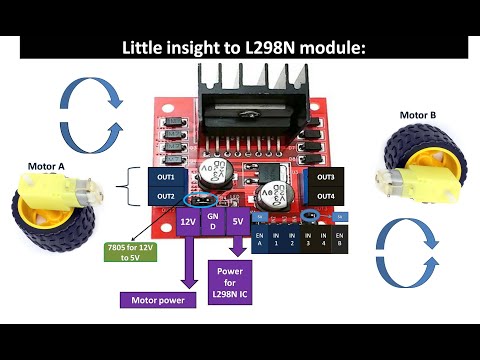
PIC16F877a/PIC16F887/PIC18/16F**** L293D/L298N motor driver IC interface using MikroC

Показать описание
Hello guys,
Welcome to Learning Microcontrollers youtube Channel,
Guys I have also compiled course on Udemy as well. Where you will learn under my direct supervision in a more supervised way.
Here is the links to the courses I have on Udemy, By taking any of these courses you will be supporting my channel aswell.
This will help me to make more videos with better hardware in the future. I hope you look forward to it.
Courses Links:
I hope you all guys are great. This is my new video on PIC microcontroller series. In this video I will teach you how to interface an L293D IC using MikroC for PIC.
Here is the code:
void main() {
TRISB = 0x00; // It makes PortB a digital Port as output means it can only send either 0 or 1 from each pin
PORTB = 0x00; // Intital state must be stop of motor. So we keep H-brdige at 0 value mean stop.
while(1) // Coding inside while(1) repeats itself while above dont
{
PORTB.B0 = 1;// Sw 1 will send 1 to H bridge
PORTB.B1 = 0;// Sw 2 will send 0 to H bridge
Delay_ms(1600); // Keep the brdige in same state for 1000 ms. means motor will remain on for 1600 ms
PORTB.B0 = 0;// Sw 1 will send 1 to H bridge
PORTB.B1 = 1;// Sw 2 will send 0 to H bridge
Delay_ms(1600); // Keep the brdige in same state for 1000 ms. means motor will remain on for 1600 ms
}
}
Welcome to Learning Microcontrollers youtube Channel,
Guys I have also compiled course on Udemy as well. Where you will learn under my direct supervision in a more supervised way.
Here is the links to the courses I have on Udemy, By taking any of these courses you will be supporting my channel aswell.
This will help me to make more videos with better hardware in the future. I hope you look forward to it.
Courses Links:
I hope you all guys are great. This is my new video on PIC microcontroller series. In this video I will teach you how to interface an L293D IC using MikroC for PIC.
Here is the code:
void main() {
TRISB = 0x00; // It makes PortB a digital Port as output means it can only send either 0 or 1 from each pin
PORTB = 0x00; // Intital state must be stop of motor. So we keep H-brdige at 0 value mean stop.
while(1) // Coding inside while(1) repeats itself while above dont
{
PORTB.B0 = 1;// Sw 1 will send 1 to H bridge
PORTB.B1 = 0;// Sw 2 will send 0 to H bridge
Delay_ms(1600); // Keep the brdige in same state for 1000 ms. means motor will remain on for 1600 ms
PORTB.B0 = 0;// Sw 1 will send 1 to H bridge
PORTB.B1 = 1;// Sw 2 will send 0 to H bridge
Delay_ms(1600); // Keep the brdige in same state for 1000 ms. means motor will remain on for 1600 ms
}
}
 0:26:49
0:26:49
PIC16F877a/PIC16F887/PIC18/16F**** L293D/L298N motor driver IC interface using MikroC
 0:03:29
0:03:29
2 Motors control using PIC16F887 and L293D
 0:18:41
0:18:41
PIC16F877A interface L293D H Bridge IC. MikroC for PIC coding and Proteus simulation Tutorial.
 0:07:16
0:07:16
Motor DC control using PIC16F877A
 0:05:30
0:05:30
DC motor speed and direction control with PIC16F877A and CCS PIC C
 0:04:58
0:04:58
DC Motor control with PIC microcontroller and L293D
![[PIC16F877A] : Interfacing](https://i.ytimg.com/vi/856g9GZUpZM/hqdefault.jpg) 0:07:03
0:07:03
[PIC16F877A] : Interfacing Servo Motor with PIC Microcontroller using MPLAB and XC8
 0:01:00
0:01:00
Driver Motor L298 Control Rotation CW and CCW Simulation on Proteus #electronics #robotics #electric
 0:11:32
0:11:32
Control dc motor speed with pwm by microcontroller 16f877A
 0:01:19
0:01:19
Hubo2+ Motor Driver Connection with PIC
 0:04:27
0:04:27
DC Motor control on PIC18
 0:18:18
0:18:18
microcontroladores pic 16f887
 0:01:25
0:01:25
Controlling speed and direction of DC Motor Using L298 and PIC16F877A Microcontroller
 0:02:20
0:02:20
Motor Driver using L293D ic
 0:09:18
0:09:18
DC motor interfacing using PIC 16f877a controller programming with Proteus Simulation Tool
 0:00:57
0:00:57
Controlling a motor using a PIC microcontroller
 0:24:15
0:24:15
PIC16F877A interface L298N module for motordriving using MikroC for PIC programming. Tutorial 1.
 0:00:42
0:00:42
Untitled 23 #proteus8#pic16f877a #mikrocforpic#dipswitch
 0:10:34
0:10:34
Microcontroller PIC16F877 Video 50 How to Interface DC Motor Using Mikro C For PIC
 0:00:27
0:00:27
PIC16F887 + 7 Segment Display Demo - PIC Projects App
 0:01:13
0:01:13
PIC16F887 IOCB in motor control example using MikroC
 0:06:07
0:06:07
Bluetooth controlled DC motor and LED using PIC16F877A
 0:02:56
0:02:56
Sensored BLDC motor drive with PIC16F887 microcontroller
 0:00:54
0:00:54
Speed and direction control of DC motor using PIC
Комментарии