filmov
tv
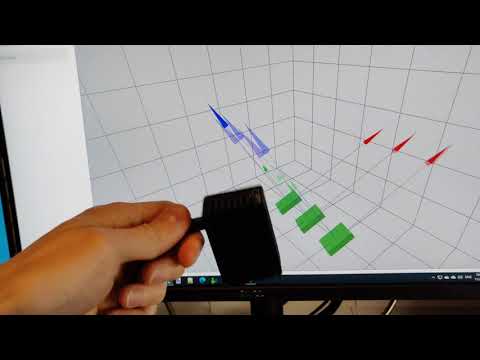
BNO085 and 2x ICM-20948 Self-Calibration from Cold Start.
Показать описание
BNO085 and ICM-20948 are two competing 9-axis IMU modules with built in motion controllers running sensor fusion algorithms. Crunching together accelerometer, gyroscope and magnetometer data they can output global rotation vector (9-axis quaternion) right away, without the need to implement your own motion algorithms on host MCU. When you power up the IMU it is uncalibrated, so you should not trust the data until you calibrate it. But the internal IMU controller runs calibration in background all the time. So the more you move it - the better it gets. You may read and store calibration settings by your host MCU, then load them at next startup so the IMU will provide correct data right-away.
BNO085 and 2x ICM-20948 Self-Calibration from Cold Start.
 0:03:04
0:03:04
BNO085 MotionEngine vs ICM-20948 DMP Comparison - Part 1
 0:01:44
0:01:44
calibration of the BNO055 - how does it occurs?
 0:00:57
0:00:57
BNO080 or BNO085 with USB to Serial Cable
 0:00:33
0:00:33
Pico4ML-BLE with ICM20948 9-axis IMU
 0:00:15
0:00:15
Using ICM-20948
 0:00:36
0:00:36
MPU 9250 vs BNO055
 0:12:05
0:12:05
STM32 ICM-20948 IMU Part 1: accelerometer and gyroscope | Do not use MPU6050 and MPU9250!
 0:00:09
0:00:09
Motion Capture ICM20948
 0:04:17
0:04:17
Chip Shortage: InvenSense TDK ICM-20948 #ChipShortage @InvenSense @Adafruit
 0:00:08
0:00:08
Sparkfun IMU Controlling a VR Object
 0:00:23
0:00:23
BNO085 IMU
 0:28:38
0:28:38
Fixing BNO085 modules with a PCB design flaw - LFC#366
 0:00:42
0:00:42
AR full body tracking using BnO085
 0:00:06
0:00:06
Visualization of the readings of BNO080 (Sparkfun VR IMU), using ROS
 0:00:15
0:00:15
ICM-20948 Invensense Excess from iBuyXS
 0:00:23
0:00:23
ICM-20948 Controlling two servo motors
 0:00:28
0:00:28
IMU position tracking device with ICM20948
 0:00:25
0:00:25
Handwriting Recognition on SparkFun Artemis ATP and 9DoF IMU Breakout Qwiic
 0:38:45
0:38:45
[STM32 Drone programming from scratch] 7-4. BNO080 calibration
 0:03:39
0:03:39
BNO085 + ESP32 Wireless Head Tracking (Doing a sortie in the flanker)
 0:16:32
0:16:32
STM32 ICM-20948 IMU Part 2: magnetometer
 0:03:34
0:03:34
BNO085 + ESP32 Wireless Head Tracking (First actual sortie)
 0:00:35
0:00:35
BNO055 | Visualization
Комментарии