filmov
tv
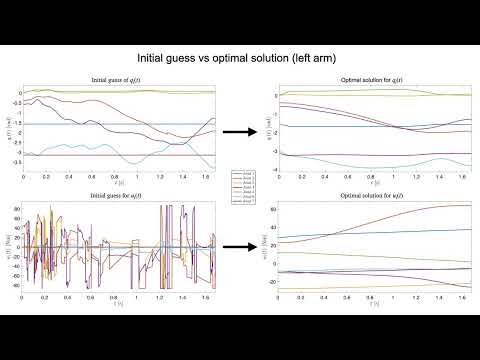
Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems
Показать описание
companion video of the paper "Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems"
Ricard
Рекомендации по теме
0:01:20
Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems
0:01:13
Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems
0:01:20
Collocation methods for trajectory optimization in constrained systems
0:46:40
Introduction to Trajectory Optimization
0:25:20
Robotics Lec 13a: Trajectory optimization using Collocation (part 1 of 2) (Fall 2022)
0:20:04
Optimal Control and Parameter Identification of Dynamcal Systems with Direct Collocation using SymPy
1:20:49
Lecture 9 Collocation, Shooting, MPC, Contact-Invariant Optimization -- CS287-FA19 Advanced Robotics
0:35:11
Robotics Lec11: Trajectory Optimization (Fall 2023)
0:12:13
Trajectory Optimisation in Learned Multimodal Dynamical Systems Via Latent-ODE Collocation
0:00:21
3-D data-tracking simulations of sprinting using a direct collocation optimal control approach
0:03:20
Direct Collocation and TVLQR on a Planar Ballbot
1:17:15
Optimal Control (CMU 16-745) 2023 Lecture 12: Direct Trajectory Optimization
0:00:15
3-DOF arm throwing a ball up to a fixed/controlled distance through direct collocation optimization
1:23:23
Optimal Control (CMU 16-745) - Lecture 12: Direct Trajectory Optimization Methods
0:00:22
Collocation double pendulum cart
0:20:51
Robotics Lec 13b: Trajectory optimization using Single Shooting (part 2 of 2) (Fall 2022)
0:03:03
Trajectory Optimization CMM-22 ETH Zurich
1:24:29
Optimal Control (CMU 16-745) 2024 Lecture 12: Direct Trajectory Optimization
0:00:57
A Direct Method for Trajectory Optimization of Rigid Bodies Through Contact
0:00:20
Assignment 6: Trajectory Optim, Direct Transcription (CMM 2022, ETH Zurich)
0:04:27
Skateboard parameter optimization and optimal control with multiphase direct collocation
0:22:15
Robotics Lec19: Trajectory Optimization (2 of 2) (Fall 2020)
0:00:22
Collocation single pendulum cart
0:01:26
Differential Flatness based Direct Collocation for a Quadrotor with a Cable-Suspended Payload
join shbcf.ru

 0:01:20
0:01:20
 0:01:13
0:01:13
 0:01:20
0:01:20
 0:46:40
0:46:40
 0:25:20
0:25:20
 0:20:04
0:20:04
 1:20:49
1:20:49
 0:35:11
0:35:11
 0:12:13
0:12:13
 0:00:21
0:00:21
 0:03:20
0:03:20
 1:17:15
1:17:15
 0:00:15
0:00:15
 1:23:23
1:23:23
 0:00:22
0:00:22
 0:20:51
0:20:51
 0:03:03
0:03:03
 1:24:29
1:24:29
 0:00:57
0:00:57
 0:00:20
0:00:20
 0:04:27
0:04:27
 0:22:15
0:22:15
 0:00:22
0:00:22
 0:01:26
0:01:26