filmov
tv
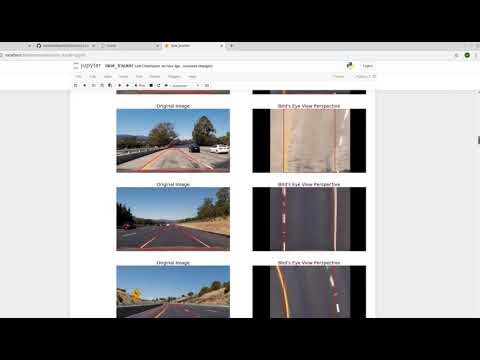
Advanced lane line detection using OpenCV

Показать описание
After applying a perspective transform of the current viewpoint to a top-down view, channel combination in L*a*b* color space is applied to obtain a grayscale image, which is then fed to a template matching system which locates lane pixels and suppresses non-lane ones. A windowed search is instantiated given a histogram peak for each lane line (left and right), followed by a windowed search over along the candidate pixels. A second order polynomial is fit to the detections and backprojected to view space.
 0:01:27
0:01:27
 0:01:17
0:01:17
 0:00:17
0:00:17
 0:00:38
0:00:38
 0:12:13
0:12:13
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:16:54
0:16:54
 0:00:51
0:00:51
 0:01:08
0:01:08
 0:00:51
0:00:51
 0:00:54
0:00:54
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:11:50
0:11:50
 0:22:27
0:22:27
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:00:51
0:00:51
 0:00:17
0:00:17
 0:00:51
0:00:51
 0:00:51
0:00:51