filmov
tv
Bipedal Locomotion with Nonlinear Model Predictive Control

Показать описание
Online Gait Generation using Whole-Body Dynamics
The publication can be found here:
The publication can be found here:
 0:01:23
0:01:23
Bipedal Locomotion with Nonlinear Model Predictive Control
 0:08:02
0:08:02
Seamless Reaction Strategy for Bipedal Locomotion Exploiting Real-Time Nonlinear MPC
 0:04:11
0:04:11
Model Predictive Control with Environment Adaptation for Legged Locomotion
 0:04:28
0:04:28
BiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
 0:01:01
0:01:01
Stochastic and Robust MPC for Bipedal Locomotion: A Comparative Study on Robustness and Performance
 0:03:29
0:03:29
Optimization-Based Reference Generator for Nonlinear Model Predictive Control of Legged Robots
 0:01:21
0:01:21
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Teaser
 0:01:01
0:01:01
Terrain-Adaptive, ALIP-Based Bipedal Locomotion Controller via MPC and Virtual Constraints-Short
 0:02:34
0:02:34
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary
 0:09:10
0:09:10
Perceptive Locomotion through Nonlinear Model Predictive Control
 0:03:59
0:03:59
Online Non-linear Centroidal MPC for Humanoid Robot Locomotion with Step Adjustment
 0:01:01
0:01:01
Bipedal Locomotion Testbed
 0:00:59
0:00:59
Real-Time Constrained Nonlinear Model Predictive Control on SO(3) for Dynamic Legged Locomotion
 0:06:57
0:06:57
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - IROS 2022 Presentation
 0:06:47
0:06:47
Neural Gaits: Learning Bipedal Locomotion via Control Barrier Functions and Zero Dynamics Policies
 0:08:52
0:08:52
Stable and versatile bipedal locomotion using Real Time Model Predictive Control
 0:01:14
0:01:14
Impact Invariant Control with Applications to Bipedal Locomotion
 0:14:14
0:14:14
AIM 2024: CAPTURE POINT CONTROL IN THRUSTER-ASSISTED BIPEDAL LOCOMOTION
 0:03:15
0:03:15
Terrain-Adaptive, ALIP-Based Bipedal Locomotion Controller via MPC and Virtual Constraints-Extended
 0:00:34
0:00:34
20240424 Nonlinear Divergent Component of Motion Model Predictive Control
 0:01:30
0:01:30
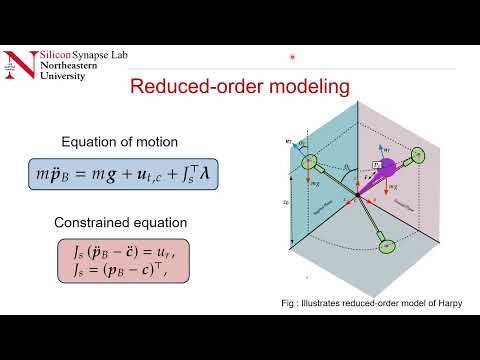
Optimal Reduced-order Modeling of Bipedal Locomotion
 0:00:20
0:00:20
Chickenmayo Robot Locomotion Project: Whole-body Impulse Control
 0:00:37
0:00:37
2019 Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedb... 3
 1:03:57
1:03:57
MIT Robotics - Jessy Grizzle - Mathematics and Learning for Bipedal Locomotion
Комментарии