filmov
tv
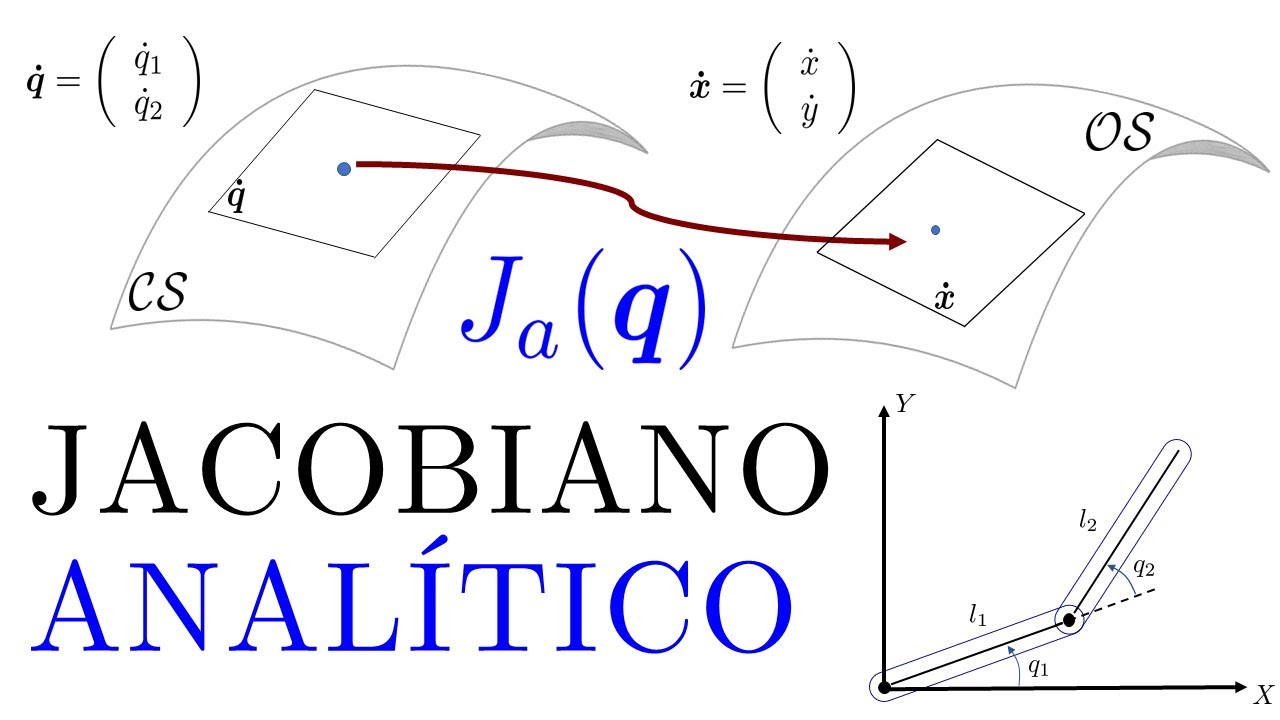
Jacobiano Analítico y Singularidades | Robot Planar de 2 GDL | Cinemática Diferencial
Показать описание
Hola a todos, en este video se calcula la cinemática de primer orden de un robot planar de 2 grados de libertad. El cálculo implica la obtención del Jacobiano analítico y a partir de él podemos estudiar las singularidades del robot
Línea de tiempo:
0:00 Intro
0:20 Recap Cinemática Directa
1:43 Cinemática Diferencial y Jacobiano Analítico (Teoría)
4:14 Ejemplo
7:17 Configuraciones Singulares
8:33 Interpretación Geométrica de Configuraciones Singulares
9:58 Outro
Línea de tiempo:
0:00 Intro
0:20 Recap Cinemática Directa
1:43 Cinemática Diferencial y Jacobiano Analítico (Teoría)
4:14 Ejemplo
7:17 Configuraciones Singulares
8:33 Interpretación Geométrica de Configuraciones Singulares
9:58 Outro
 0:10:18
0:10:18
Jacobiano Analítico y Singularidades | Robot Planar de 2 GDL | Cinemática Diferencial
 0:33:15
0:33:15
Cinemática diferencial, jacobiano analítico y configuraciones singulares del robot (con ejemplos)
 0:30:58
0:30:58
Jacobiano del manipulador y puntos singulares (singularidades)
 0:14:04
0:14:04
#SINGULARIDAD Y MATRIZ #JACOBIANA | zDynamics
 1:09:35
1:09:35
MT3005 Lección 8 - más sobre el jacobiano: singularidades y manipulabilidad
 0:12:44
0:12:44
XXVII. Singularidades - Ejemplo 1
 0:14:31
0:14:31
JACOBIANO (USO E INTERPRETACIÓN)
 0:16:54
0:16:54
SIGNIFICADO FÍSICO DE LA MATRIZ #JACOBIANA GEOMÉTRICA | zDynamics
 0:09:07
0:09:07
Rob 4 11 Jacobiana analitica
 0:03:45
0:03:45
Definición e interpretación de puntos singulares en el Jacobiano de la transformación
 1:14:54
1:14:54
MT3005 Lección 7 - métodos para determinar el jacobiano de manipuladores seriales
 0:06:56
0:06:56
AM2 Clase19g Concepto de Jacobiano
 0:08:15
0:08:15
Cinemática diferencial: Jacobiano Analítica
 0:10:55
0:10:55
MATRIZ JACOBIANA GEOMÉTRICA | zDynamics
 0:10:01
0:10:01
XX. Matriz Jacobiana - Ejemplo 1 (pt1)
 1:05:19
1:05:19
Coloquio Sebastian Reyes Sobre Curvas Jacobianas con Automorfismo
 1:19:28
1:19:28
CR72 11 11 21 Tool velocity, Jacobiano analítico, Singularidades
 0:09:21
0:09:21
SINGULARIDADES EN TIPOS DE MOVIMIENTOS UNIVERSAL ROBOTS
 0:13:50
0:13:50
XXIII. Matriz Jacobiana - Ejemplo 2
 0:09:25
0:09:25
Rob 4 10 Modelo Diferencial Matriz Jacobiana
 1:43:37
1:43:37
Modelado y Control de Sistemas Mecatrónicos y Robots. Cinemática Diferencial.
 0:50:30
0:50:30
Modelado y Control de Sistemas Mecatrónicos y Robots. Problema Matríz Jacobiana.
 0:13:39
0:13:39
XXVIII. Singularidades - Ejemplo 2
 0:07:26
0:07:26
Cómo Calcular la Jacobiana de un Brazo Robot: Ejemplo Numérico | Sistemas Robotizados
Комментарии