filmov
tv
Все публикации
0:03:00
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots (RA-L, 2025)
0:03:55
Multi-Sensor Fusion for Quadruped Robot State Estimation using Invariant Filtering and Smoothing
0:03:07
IIT-INAIL Robot Teleoperativo 2
0:01:38
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning (RA-L 25)
0:01:00
PACC: A Passive-Arm Approach for High-Payload Collaborative Carrying with Quadruped Robots using MPC
0:01:00
On the Benefits of GPU Sample-Based Stochastic Predictive Controllers for Legged Locomotion [IROS24]
0:01:01
Accelerating Model Predictive Control for Legged Robots through Distributed Optimization [IROS 2024]
0:02:20
VERO: a Vacuum-cleaner-Equipped Quadruped RObot for Efficient Litter Removal
0:01:56
Panoptic-SLAM: Visual SLAM in Dynamic Environments using Panoptic Segmentation
0:05:01
On discrete symmetries of robotics systems: A group-theoretic and data-driven analysis
0:02:55
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion [UR 2024]
0:04:41
SafeSteps: Learning Safer Footstep Planning Policies for Legged Robots via Model-Based Priors
0:02:17
Reactive Landing Controller for Quadruped Robots (RA-L 23)
0:03:37
Locosim: an Open-Source Cross-Platform Robotics Framework (Clawar 23)
0:01:00
Quadrupedal Footstep Planning using Learned Motion Models of a Black-Box Controller (IROS 23)
0:02:29
Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]
0:14:28
ViTAL: Vision-Based Terrain-Aware Locomotion for Legged Robots (T-RO 23)
0:04:56
An Efficient Paradigm For Feasibility Guarantees For Legged Robots (T-RO 23)
0:01:54
Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots
0:03:29
Optimization-Based Reference Generator for Nonlinear Model Predictive Control of Legged Robots
0:00:11
Robot Teleoperativo with President Mattarella
0:03:01
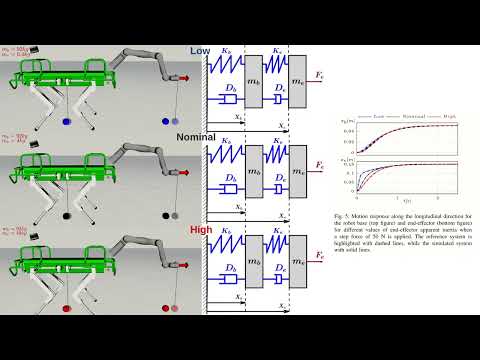
A Whole-Body Controller for Rendering Impedances in Quadruped Manipulators [IROS 2022]
0:01:35
First Field Tests of a Legged Robot in a Vineyard - HyQReal
0:03:01
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped Robots
Вперёд
join shbcf.ru
 0:03:00
0:03:00
 0:03:55
0:03:55
 0:03:07
0:03:07
 0:01:38
0:01:38
 0:01:00
0:01:00
 0:01:00
0:01:00
 0:01:01
0:01:01
 0:02:20
0:02:20
 0:01:56
0:01:56
 0:05:01
0:05:01
 0:02:55
0:02:55
 0:04:41
0:04:41
 0:02:17
0:02:17
 0:03:37
0:03:37
 0:01:00
0:01:00
 0:02:29
0:02:29
 0:14:28
0:14:28
 0:04:56
0:04:56
 0:01:54
0:01:54
 0:03:29
0:03:29
 0:00:11
0:00:11
 0:03:01
0:03:01
 0:01:35
0:01:35
 0:03:01
0:03:01