filmov
tv
Rotation Matrix Tutorial for Robotics and Aerospace - Z rotation - Complete Derivation

Показать описание
#robotics #roboticstutorials #roboticstraining #roboticsengineering #mechanicalengineering #mechatronics #roboticseducation #automation #plc #controlengineering #kinematics #mechanics #dynamics #dynamicalsystems #electricalengineering #aerospacetutorials #aerospace #spaceX #machinelearning #controltheory #optimalcontrol #optimization #mathematics #computergraphics
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
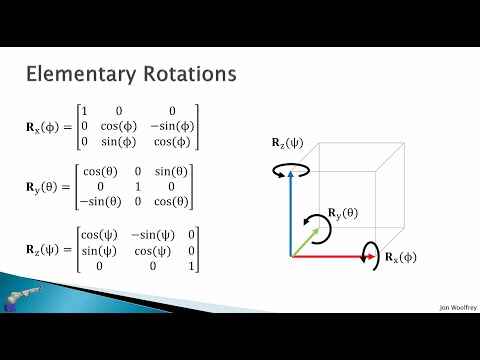
In this robotics, GNC, and aerospace tutorial, we explain the concept of rotation matrices. We consider the case of rotation of two coordinate systems with respect to the Z axis. By using vector calculus we derive the expression for the z-rotation matrix. We explain how the rotation matrices are used to convert vector representations from one coordinate system to another. We then explain that the rotation matrices are orthogonal. We also provide a clear graphical explanation of rotation matrices.
Rotation matrices are very important in robotics, aerospace engineering, and guidance, navigation, and control. I noticed that it is a common misconception among students studying robotics and aerospace that rotation matrices are actually rotating vectors. They are not rotating vectors, they are the consequence of two coordinate systems rotated with respect to each other. Usually, the so-called body coordinate system is fixed to the rotating object, and rotation matrices are used to transform the coordinates of a vector from the body frame to some other (usually inertial) frame. Here is the tutorial I made that explains
1.) What are the rotation matrices.
2.) How to derive them.
3.) How they are used to transform coordinates from one coordinate system to another.
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
In this robotics, GNC, and aerospace tutorial, we explain the concept of rotation matrices. We consider the case of rotation of two coordinate systems with respect to the Z axis. By using vector calculus we derive the expression for the z-rotation matrix. We explain how the rotation matrices are used to convert vector representations from one coordinate system to another. We then explain that the rotation matrices are orthogonal. We also provide a clear graphical explanation of rotation matrices.
Rotation matrices are very important in robotics, aerospace engineering, and guidance, navigation, and control. I noticed that it is a common misconception among students studying robotics and aerospace that rotation matrices are actually rotating vectors. They are not rotating vectors, they are the consequence of two coordinate systems rotated with respect to each other. Usually, the so-called body coordinate system is fixed to the rotating object, and rotation matrices are used to transform the coordinates of a vector from the body frame to some other (usually inertial) frame. Here is the tutorial I made that explains
1.) What are the rotation matrices.
2.) How to derive them.
3.) How they are used to transform coordinates from one coordinate system to another.
 0:16:08
0:16:08
Introduction to Rotation Matrices in Robotics
 0:11:31
0:11:31
Easy Rotation Matrix Tutorial for Robotics and Aerospace - Derivation of Y-Axis Rotation Matrix
 0:12:41
0:12:41
Easy Rotation Matrix Tutorial for Robotics and Aerospace - Derivation of X-Axis Rotation Matrix
 0:10:48
0:10:48
Rotation Matrix Tutorial for Robotics and Aerospace - Z rotation - Complete Derivation
 0:11:14
0:11:14
2.3 Rotations in 3D
 0:11:22
0:11:22
Understanding the Rotation Matrix
 0:22:01
0:22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
 0:02:54
0:02:54
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 1 of 2)
 0:09:01
0:09:01
Robotic systems. Rotation matrix. | | UPV
 0:10:13
0:10:13
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
 0:08:49
0:08:49
Rotation Matrix | Coordinate Transformations | Robotics 201
 0:30:46
0:30:46
Rotation Matrices in Robotics | Fundamentals of Robotics | Lesson 8
 0:21:20
0:21:20
Correct and Clear Explanation of Rotation Matrices in Robotics - Learn Robotics Correctly
 0:05:05
0:05:05
Rotation matrix derivation (step-by-step prove)
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:00:59
0:00:59
How to use a Rotation Matrix? | Animated Math in 1min
 0:09:01
0:09:01
Rotation Matrix | Robotic Systems
 0:00:36
0:00:36
Robotics 1 - Rotation Matrices
 0:02:11
0:02:11
Rotational Matrix of 2D Frame
 0:11:45
0:11:45
2.2 Rotation Matrices
 0:22:04
0:22:04
Correct Explanation of Direction Cosine Matrix - Aerospace and Robotics Tutorial
 0:00:14
0:00:14
Egr 455: Homogeneous Transformation Matrix
 0:05:08
0:05:08
Translation and Rotation Matrix - HEBI Robotics - Robotics Lecture Series
 0:09:08
0:09:08
Introduction to Homogeneous Transforms in Robotics
Комментарии