filmov
tv
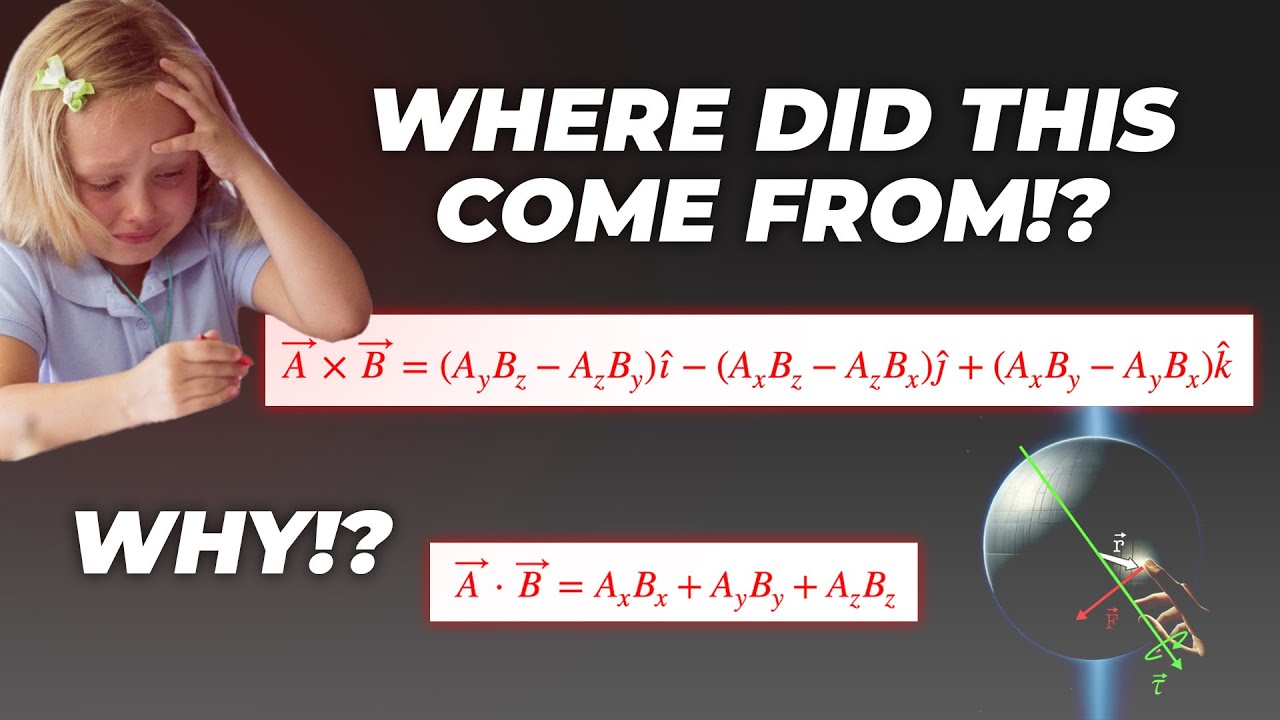
The Physical Meaning of the Cross Product and Dot Product
Показать описание
00:00 Introduction
00:30 Work and the Dot Product
3:01 Proof of the Dot Product Formula
4:52 Torque and the Cross Product
7:35 Tutoring Advertisement
7:54 The Right Hand Rule
9:36 The Physical Meaning of the Torque Vector
11:09 Physical Proof of the Cross-Product Formula
15:36 Summary
16:12 Outro
 0:16:26
0:16:26
The Physical Meaning of Maxwell's Equations | The Secrets of the Universe
 0:00:36
0:00:36
Physical Meaning
 0:06:03
0:06:03
What's the physical meaning of imaginary numbers?
 0:02:49
0:02:49
Yakir Aharonov - The physical meaning of time
 0:03:21
0:03:21
The meaning of the integral - Integration - Mathematics- Pre-university Calculus - TU Delft
 0:00:39
0:00:39
Physical meaning in Hindi | Physical ka kya matlab hota hai | daily use English words
 0:00:32
0:00:32
Physical chemistry Meaning
 0:00:44
0:00:44
Алексей Семихатов о NewYorkTimes и Эйнштейне #подкаст #эйнштейн #семихатов...
 0:00:38
0:00:38
no.711 warning ⚠️ I showed a very interesting thing by lighting the lamp with the help of acetone🕯️🎂...
 0:44:23
0:44:23
Physical meaning of Moment of Inertia | Engineering Mechanics | Mechanical & Civil | Gate & ...
 0:00:34
0:00:34
Physically meaning in Hindi | Physically ka kya matlab hota hai | daily use English words
 0:07:10
0:07:10
Wave Function | Physical meaning of Psi
 0:01:00
0:01:00
This Device Defies LAWS OF PHYSICS
 0:00:31
0:00:31
Physically challenged Meaning
 0:00:35
0:00:35
Physical education Meaning
 0:12:52
0:12:52
Developing Multidimensional Awareness of INFINITE Possibilities
 0:00:07
0:00:07
BODY Meaning #shorts
 0:00:06
0:00:06
#teach #Teachboxing #Boxingskills #Boxinglife
 0:00:35
0:00:35
Physics Meaning
 0:00:27
0:00:27
Physically Meaning In Urdu
 0:01:00
0:01:00
New Discovery Shows the Milky Way’s Ancient Disk Shaped Our Galaxy
 0:00:55
0:00:55
Physical meaning in Hindi | Physical ka matlab kya hota hai | With sentence examples
 0:00:56
0:00:56
Her Posture Was PERFECT With This!🥰
 0:00:59
0:00:59
The NEW Meaning of the Mole in 60 Seconds #shorts by Parth G Physics
Комментарии