filmov
tv
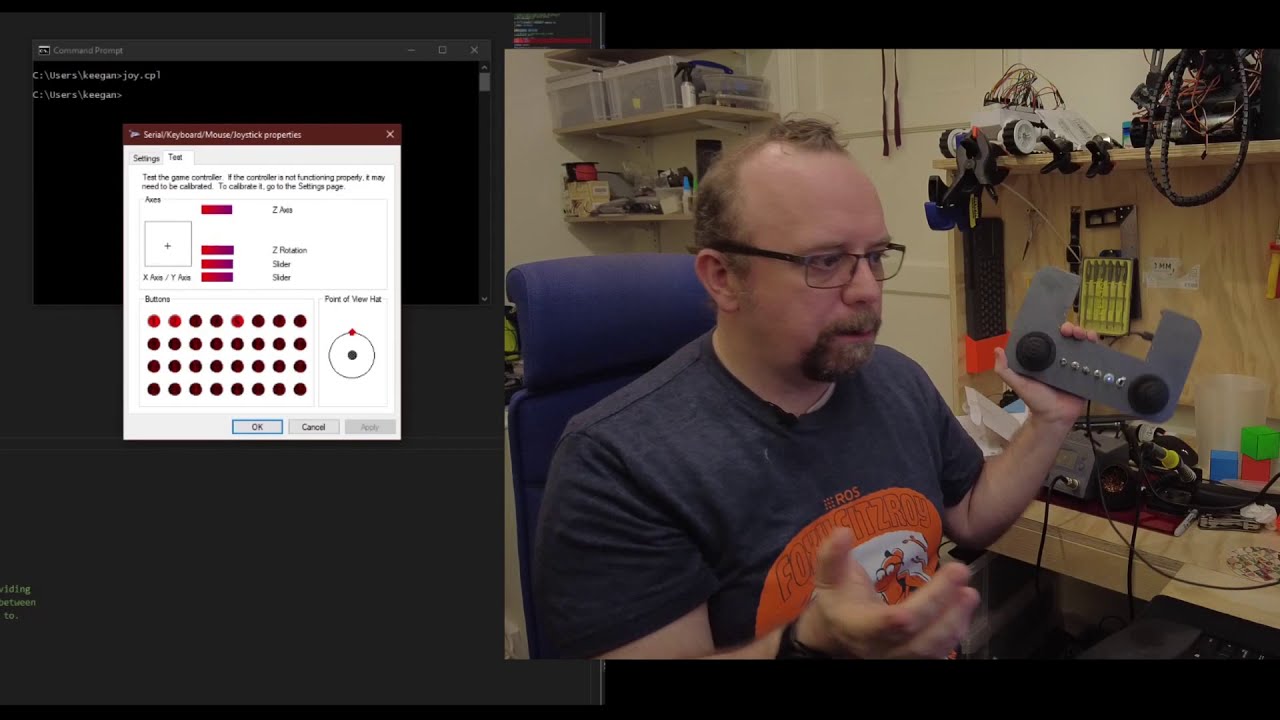
Let's Take Control!
Показать описание
Continuing work on my robot controller, I finish up the wiring and coding for the controls and my custom USB joystick is complete! It's based around a Teensy 4.0 which presents itself as a USB Joystick to whatever computer it's plugged in to. Where before the Teensy was generating ROS messages and sending them straight to the robot, it will now just act as a joystick and whatever it plugs in to will generate the messages. This mean's I'll be able to use it for ROS and ROS2, as well as anything else!
Code will soon be available on github, it'll be on my GitHub org:
If you're able to, please consider supporting me on Patreon:
The encoder I'm using in this is this one:
Code will soon be available on github, it'll be on my GitHub org:
If you're able to, please consider supporting me on Patreon:
The encoder I'm using in this is this one:
 0:01:32
0:01:32
Balansio – Let´s take control
 0:06:11
0:06:11
DJ BoBo - Take Control & Let The Dream Come True (MYSTORIAL)
 0:19:09
0:19:09
Russia's Shocking Mistake Lets Ukraine Take Control
 0:04:04
0:04:04
Dua Lipa - Physical (Official Video)
 0:03:12
0:03:12
Tiësto - The Business (Official Music Video)
 0:02:04
0:02:04
NYC Subway Motorman Lets Girlfriend Take Controls: MTA | NBC New York
 0:05:47
0:05:47
Let's Take Control
 0:06:33
0:06:33
Marjorie Taylor Greene Lets the Delusions Take Over During WILD Outburst
 0:01:13
0:01:13
Stop Relying on Yourself: Let God Take Control #shorts #faith #spiritualgrowth #Surrender #strength
 0:08:58
0:08:58
HOW TO LET GOD TAKE CONTROL IN YOUR LIFE | Bishop Mar Mari Emmanuel
 0:03:41
0:03:41
Activate - Let The Rhythm Take Control (90 Festival 2016)
 0:17:01
0:17:01
Let Go Of What You Can't Control | Steven Furtick
 0:03:08
0:03:08
Let's Get This Over With
 0:02:31
0:02:31
'Let the Music Take Control' (aka 'Let it Go') - 🎵 Songs from The Next Step 🎵...
 0:04:15
0:04:15
Passenger | Let Her Go (Official Video)
 0:00:16
0:00:16
𝗟𝗲𝘁’𝘀 𝗚𝗼🔥🏍️✨#𝗿𝗮𝗰𝗲#𝗿𝗮𝗰𝗲 𝗹𝗼𝘃𝗲𝗿#𝗸𝘁𝗺𝗹𝗼𝘃𝗲𝗿#𝗱𝘂𝗸𝗲𝗹𝗼𝘃𝗲𝗿#𝘁𝗿𝗲𝗻𝗱𝗶𝗻𝗴#𝘁𝗼𝗽#𝘀𝘁𝗮𝘁𝘂𝘀#𝘃𝗶𝗿𝗮𝗹#𝗵𝗶𝗮𝘀𝗵𝗼𝗿𝘁𝘀#𝘀𝗵𝗼𝗿𝘁𝘀...
 0:03:52
0:03:52
Let The Music Take Control (Extended Mix)
 0:00:20
0:00:20
𝗟𝗲𝘁’𝘀 𝗚𝗼🔥🏍️✨#𝗿𝗮𝗰𝗲#𝗿𝗮𝗰𝗲 𝗹𝗼𝘃𝗲𝗿#𝗸𝘁𝗺𝗹𝗼𝘃𝗲𝗿#𝗱𝘂𝗸𝗲𝗹𝗼𝘃𝗲𝗿#𝘁𝗿𝗲𝗻𝗱𝗶𝗻𝗴#𝘁𝗼𝗽#𝘀𝘁𝗮𝘁𝘂𝘀#𝘃𝗶𝗿𝗮𝗹#𝗵𝗶𝗮𝘀𝗵𝗼𝗿𝘁𝘀#𝘀𝗵𝗼𝗿𝘁𝘀...
 0:01:33
0:01:33
MyGM Mode lets you take control in WWE 2K22
 0:05:04
0:05:04
Hugo Wins Visual Effects: 2012 Oscars
 0:00:11
0:00:11
𝗟𝗲𝘁’𝘀 𝗚𝗼🔥🏍️✨#𝗿𝗮𝗰𝗲#𝗿𝗮𝗰𝗲 𝗹𝗼𝘃𝗲𝗿#𝗸𝘁𝗺𝗹𝗼𝘃𝗲𝗿#𝗱𝘂𝗸𝗲𝗹𝗼𝘃𝗲𝗿#𝘁𝗿𝗲𝗻𝗱𝗶𝗻𝗴#𝘁𝗼𝗽#𝘀𝘁𝗮𝘁𝘂𝘀#𝘃𝗶𝗿𝗮𝗹#𝗵𝗶𝗮𝘀𝗵𝗼𝗿𝘁𝘀#𝘀𝗵𝗼𝗿𝘁𝘀...
 0:03:13
0:03:13
Hollow Knight - Let’s Get This Over With - Pmv / animatic
 0:13:52
0:13:52
LET'S FIND LARRY..
 0:00:29
0:00:29
lets take control of time by not letting it slip away... #mindfulproductivity #focusbetter #time
Комментарии